

| 構成が簡単で物体検出効率の高い測距装置 |


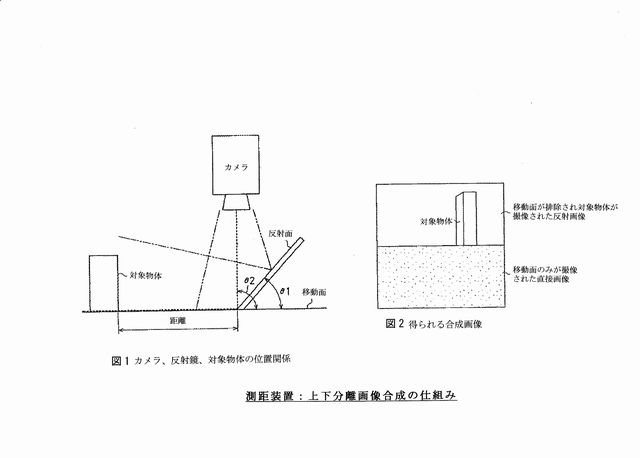
| 車や電車のように常に移動する物体から目的対象物迄の距離を敏速に測ろうとする場合、通常は音波や電磁波を目的物体に放射して、この波動が反射して戻ってくるまでの時間により距離を計算する方法が一般的である。しかし、この方法の大きな欠点は目的物体が樹木や土砂のように波動を吸収してしまうような場合には適用できないことである。そこで近年、デジタルカメラ等で目的物体を撮影し、得られた画像を解析し、三角測量の原理を使って距離を算出する技術が開発され、実用化されている。しかし、この技術にも次の問題点がある。目的物体に影がある場合にはその影を物体の一部として認識してしまうために測定精度が低下する。もう一つはこの方式の核心ともいうべき画像領域の分離、すなわち、目的物体の写っている領域画像と、物体の写っていない領域画像を分離することが前提になっている。なぜならば画像解析をする前に物体の存在する領域を切り取る必要があるからである。この分離工程が介在するために物体の検出効率が非常に悪くなってしまう。本発明は反射鏡の取り付け角度を工夫することにより画像領域の分離を自動的に行うことができる(図2を参照)。その結果、移動面を排除した画像が得られるので目的物体は影のない画像となっている。これらの要因が大きく寄与し、測定の精度を向上させ、検出効率が高くなることにより測距離に要する時間が短縮される。 |

| ユーザー業界 | 活 用 ア イ デ ア |
 輸送  その他 | 船舶の安全航行用測距装置 ○他の航行船舶、浮遊物、橋脚、岩礁など安全航行上注意すべき物体を自動的に発見、警報を出し、距離を表示 |
 機械・加工 | 宇宙作業用測距装置 ○ランデブ制御、その他距離感を掴むのが困難な対象物への接近などに。宇宙ロボットに搭載もできる |

| 関連特許 | なし |
| 特許情報 |
・実施段階:実施無し ・技術導入時の技術指導の有無:応相談 ・ノウハウ提供:応相談 ・ライセンス制約条件について:許諾のみ |
| market potential | カーナビゲーションシステムなどの進化により、空間情報の重要性が広く認識されるようになってきた。こうした状況から社会インフラの新規需要が誘発され、新たなセンシング機器需要の増加を生んでいる。事実、本発明技術の分野である光センシング機器市場を見るとその生産額は2004年に大幅増があり、2005年以降も上昇を続けている。また、測距装置を測量機器と見てもこの市場規模は年2,200億円(販売高)といわれる。移動体が搭載する測距装置の用途の一つは自動車であろうが、高級車には既に搭載され、トレンドとして増加している。もう一つの分野はやはりロボットであろう。すなわち、3K職場のロボット化、医療介護、災害関連など広い分野でロボット化が進むにつれ、性能の良い、コンパクトな測距装置のニーズが高まる。将来的には鉄道車両、土木建築、災害対応、船舶航行、防衛兵器、未開地探検調査、スポーツなど広い分野での実用の可能性を秘めている。 |
 |