| 滑らない、衝撃を感じない、手や脇が痛くならない、使っていて疲れない、安心して使える松葉杖用石突。 |


|
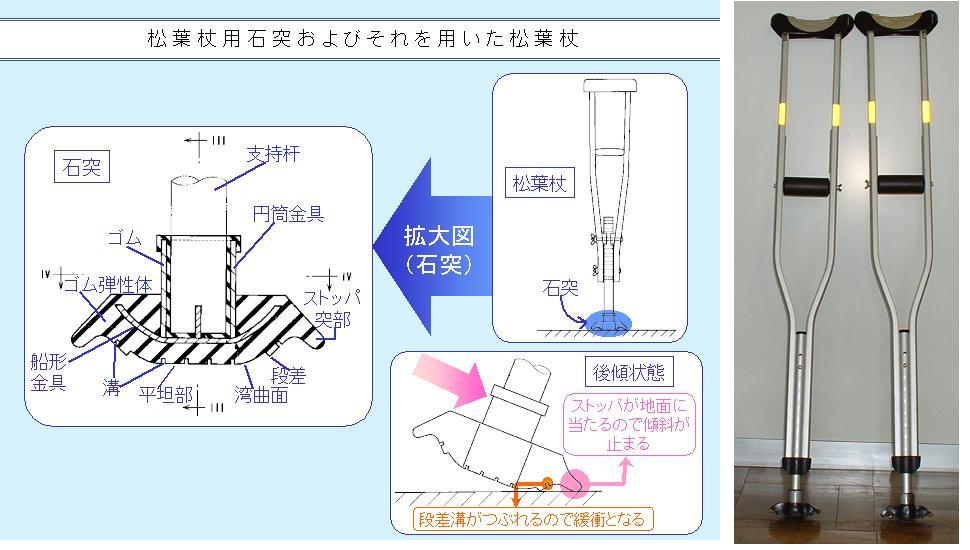
本発明は、使い勝手が良く且つ安全性に優れた松葉杖用石突を目指したものである。松葉杖は使用中に後傾、鉛直、前傾状態の繰り返しであり、特に後傾、前傾状態の時に滑る危険性がある。また、体重が乗った状態で地面を突くので、突く度に接地面からの衝撃が手、腕、及び脇当てに伝わるので手や脇下を傷める可能性がある。当該技術は杖をついた時に接地する部分、所謂石突の材質や形状を工夫してこれらの問題を解決している。即ち、石突部分をゴム弾性体で形成し、弾性ゴムは補強金属(補強なしでも可)と杖挿入ボスと一体加硫処理されている。石突部の形状は、全体として薄肉の略矩形平板形状(杖を中心とした同心円でも可)であり、横断面は底部が平で、長手方向の両端部にかけて略一定の曲率で上方へ湾曲している。曲面の途中に、段差(肉厚なる方向に)があり段差から少し離れた両端部は下方に垂れ下がった形状(ストッパーと称す)になっている。ストッパーにより前・後傾斜角が制限されている。また、底面及び段差部に滑り止めのための溝を、適宜長手直角方向に設けてある。杖を垂直に立て、底面の平坦部が接地した状態で段差の位置は接地または若干隙間があく程度、ストッパー突部の先端は僅か接地しない程度の位置関係にある。これら形状寸法及び各部位の位置関係は、弾性材と併せ安全確保、体重移動に伴なう衝撃緩和に大きく影響するものであり、当該技術の特徴にもなっている。
|

| ユーザー業界 | 概 要 |
 電気・電子  機械・加工 |
●滑らず衝撃のない二足ロボットの足底 足底の材質は弾性ゴム。例えば、垂直に立った状態で足底の中心周辺を平面または凹面とし、足底の前後を上方に湾曲させる。底部両端は下方に垂れ下がった形状(ストッパー)にして、踏み込んだ時と蹴る時にストッパーが接地することにより滑らないようにする。足底には滑り止めの溝を適宜設ける。材質、形状、寸法は試作を重ねて決める。 |

| 関連特許 |
なし |
| 事業実績条件 |
・実施段階:試作 ・技術導入時の技術指導の有無:あり ・ノウハウ提供:あり ・ライセンス制約条件について:許諾 |
| 参考情報 | 松葉杖の石突用として、滑りにくゝ、衝撃を緩和し、安心して使える当該技術は、二足ロボットの足底としての活用が可能と考える。将来、二足ロボットがモノを持ち上げ、移動する時代が到来した場合、体形のバランスを始め、移動中の足の滑りや、接地面からの衝撃が課題になると思う。当該技術は安全な石突に適合する材料、形状、寸法を提示したものである。松葉杖自体には関節がなく人と同じ関節をもつ二足ロボットとは基本的に機能が異なり、本発明を即ロボットに適用すること出来ないと思うが、当該技術をベースにロボットの使用目的に合わせた足底への改良は可能である。現在二足ロボットの市場は小さいが、ロボット全体としては将来3兆円市場と言われており、二足ロボットの市場も拡大すると考えられる。 |