| 3次元CADデータを用い対象物体を高精度で認識可能とすることによりロボットの制御を高知能化する手法 |


|
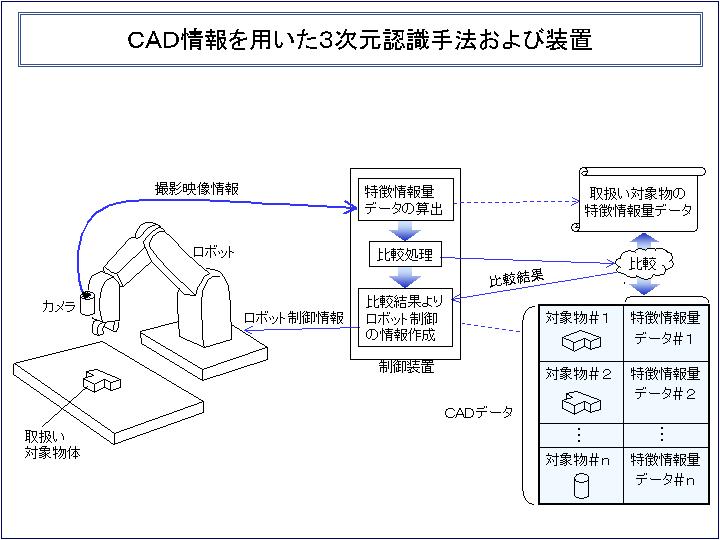
複数の対象物体に関する3次元のCADデータから、これら対象物体それぞれについて特定方向から直交面に投影した幾つかの2次元図形を導き、この2次元図形の重心、輪郭線、輪郭線上の各点における輪郭線との法線方向、重心から輪郭線上の各点までの距離などの特徴情報量を算出する。ロボットで取り扱おうとしている特定対象物体をロボットのカメラにより一箇所の所定方向から撮影する。このカメラからの画像をもとにして2次元サーフェースモデルを導き、CADデータと同様の特徴情報量を算出する。カメラの映像から得られる取り扱い対象物体の特徴情報量と上記CADデータからの特徴情報量とを比較し差が最小な物体を探すことにより、カメラが捉えた特定物体の種類と姿勢とを判別する。2次元画像図形の輪郭線から重心までの距離の極大点や法線方向分布の極大点および重心位置などから、ロボットが把持し易い方向および位置を判別する。これらの結果に基づいて対象物体の方向を変えたり移動させたりしてロボットが対象物体を良好に掴む事が可能となる。また、CAD情報からの特徴情報量の算出をオンラインで行なうには時間が掛かりすぎるような場合には予めオフラインで計算をし計算結果としての特徴情報量をデータベースとして処理装置内に持つ事とする。
|

| ユーザー業界 | 概 要 |
 機械・加工 |
生産用ロボット
○生産ラインにおける組み立て工程 用ロボット |
 電気・電子  生活・文化 |
家事用ロボット
○掃除など複数物体を扱う家事用ロ ボット |
 土木・建築 |
工事用ロボット
○危険エリアや狭窄エリアでの作業 を行なうロボット |

| 関連特許 |
なし |
| 事業実績条件 |
・実施段階:試作段階
・技術導入時の技術指導の有無:応相談 ・ノウハウ提供:応相談 ・ライセンス制約条件:許諾のみ |
| 参考情報 | 生産コスト削減や安全性の確保のため、加工や組み立てなどの生産ラインへロボットを導入しての自動化が重要になっている。加工工程ではすでに多くのロボットが導入されているが、加工品をアセンブルする組み立て工程では、対象物体の3次元的な認識が必要で、しかも類似物体の識別が求められるなど複雑な制御を要するため、経済性の面から自動化が遅れている。本特許の適用により一箇所からのカメラ映像の解析結果とCADの3次元データとを比較する事により正確に対象物体の特定とその姿勢の識別が可能となる。これにより生産ライン組み立てなどにおけるロボットを安価に実現できるようになり、さらにはCADデータの利用によりロボットハンドの操作をより柔軟に制御することが出来る。その結果生産ライン設備の低価格化と同時に効率化を促進できる。 |