| 出願番号 |
特願2023-113887 |
| 出願日 |
2023/7/11 |
| 出願人 |
学校法人東京電機大学 |
| 公開番号 |
特開2025-011654 |
| 公開日 |
2025/1/24 |
| 発明の名称 |
ソフトアクチュエータシステム |
| 技術分野 |
機械・加工 |
| 機能 |
制御・ソフトウェア |
| 適用製品 |
ロボットフィンガー、ロボットアーム、リハビリテーション機器 |
| 目的 |
当初から機構等を組み込むことなく、空気圧方式を含む流体圧式のソフトアクチュエータの局所的な伸縮運動を非直線運動に変換するソフトアクチュエータシステムを提供する。ソフトアクチュエータの初期形状や動作方向、屈曲箇所の調節を可能な構造を提供する。 |
| 効果 |
空気圧方式を含む流体圧式のソフトアクチュエータの局所的な伸縮運動を非直線運動に変換するソフトアクチュエータシステムを提供するもので、当初から機構等を組み込むことなく、ソフトアクチュエータの初期形状や動作方向、屈曲箇所の調節を可能な構造を提供することができる。 |
技術概要
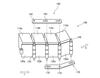 |
内部に作動流体を収納可能な流体室を有し、該作動流体の圧力によって伸縮するソフトアクチュエータと、
前記ソフトアクチュエータに装着され、前記ソフトアクチュエータと比べて剛性が高い材料からなる連結調整部材と、
複数の前記連結調整部材を備えた前記ソフトアクチュエータの前記連結調整部材同士を連結させるとともに、連結された前記連結調整部材相互の動作を規制する規制部材と、を備えるソフトアクチュエータシステム。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)