| 出願番号 |
特願2022-132475 |
| 出願日 |
2018/9/12 |
| 出願人 |
学校法人神奈川大学 |
| 公開番号 |
特開2022-164742 |
| 公開日 |
2022/10/27 |
| 登録番号 |
特許第7525922号 |
| 特許権者 |
学校法人神奈川大学 |
| 発明の名称 |
把持装置及びロボットアーム |
| 技術分野 |
機械・加工 |
| 機能 |
機械・部品の製造、制御・ソフトウェア |
| 適用製品 |
被把持物を把持する把持装置及びこれを備えたロボットアーム |
| 目的 |
把持空間の軸線方向に沿って被把持物を移動させる場合でも、把持空間の拡縮に支障をきたす事態の発生を抑制でき、しかも把持空間で把持した被把持物を滑らせずに把持できる把持装置を提供する。 |
| 効果 |
把持装置における把持空間の軸線方向に沿って被把持物を移動させる場合でも、把持空間の拡縮に支障をきたす事態の発生を抑制でき、しかも把持空間で把持した被把持物を滑らせずに把持できるので、適切な把持が実現できる。 |
技術概要
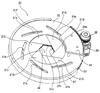 |
互いに隣接するように環状配置される複数の可動部材が、隣り合う可動部材間の隣接面同士を互いに対向させて移動することで、該複数の可動部材によって囲まれて形成される把持空間が縮小し、該把持空間に被把持物を把持する把持装置であって、
隣り合う可動部材間で互いに対向する2つの隣接面のうち前記把持空間の壁面になる第一隣接面に形成される第一係合形状部は、該2つの隣接面のうち前記把持空間の壁面にはならない第二隣接面に形成される第二係合形状部に対し、前記2つの隣接面の相対移動方向に対して直交する方向であって該隣接面に平行な方向に沿った一方向又は双方向の相対的な変位が規制されるように係合することを特徴とする把持装置。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)