| 出願番号 |
特願2022-083617 |
| 出願日 |
2022/5/23 |
| 出願人 |
学校法人 龍谷大学 |
| 公開番号 |
特開2023-172063 |
| 公開日 |
2023/12/6 |
| 発明の名称 |
ホッピング走行ロボット及びホッピング走行ロボット設計方法 |
| 技術分野 |
機械・加工 |
| 機能 |
機械・部品の製造 |
| 適用製品 |
ホッピング走行ロボット及びホッピング走行ロボット設計方法 |
| 目的 |
移動速度の調整が可能なホッピング走行ロボットを提供する、また、所望の移動速度を実現するホッピング走行ロボットの設計が可能なホッピング走行ロボット設計方法を提供する。 |
| 効果 |
移動速度の調整が可能となる。また、所望の移動速度を実現するホッピング走行ロボットの設計が可能になる。 |
技術概要
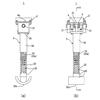 |
胴体部と、
関節部において前記胴体部に上端部が回動可能に接続され、変形量に応じた復元力を有する脚バネ体と該脚バネ体のバネ定数を調整するバネ定数調整器が設けられた脚部と、
前記胴体部と前記脚部の間に接続され、前記関節部を中心とした前記胴体部と前記脚部の間の角度に応じた復元力を有する関節バネ体と、
を備えるホッピング走行ロボット。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【可】
|
| 特許権実施許諾 |
【可】
|
)