| 出願番号 |
特願2016-171104 |
| 出願日 |
2016/9/1 |
| 出願人 |
国立大学法人信州大学 |
| 公開番号 |
特開2017-047210 |
| 公開日 |
2017/3/9 |
| 登録番号 |
特許第6781453号 |
| 特許権者 |
国立大学法人信州大学 |
| 発明の名称 |
ロボティックウエアを用いた同調制御による起立動作支援方法、起立動作支援用コンピュータプログラムおよびロボティックウエア |
| 技術分野 |
食品・バイオ、化学・薬品 |
| 機能 |
制御・ソフトウェア |
| 適用製品 |
コンピュータプログラム、ロボティックウエア |
| 目的 |
装着者が違和感あるいは拘束感を覚えることなく自身の意図する起立動作に沿った動作形態で起立動作支援を行う、ロボティックウエアを用いた起立動作支援方法を提案すること。 |
| 効果 |
本発明の起立動作支援方法は、起立動作支援に同調制御を用いているので、装着者自身の能力に応じてアシスト力の強弱を調整することができる。したがって、日常の起立動作支援の他に、リハビリ訓練などにおいて、効果的な訓練効果が得られることが期待される。 |
技術概要
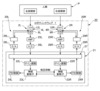 |
ロボティックウエアを用いた起立動作支援方法は、装着者Pの股関節の両側にアシスト力が作用する状態に、当該アシスト力を発生する股関節アクチュエータ4L、4Rを有する股関節ユニット2L、2Rを備えたロボティックウエア1を用いる。装着者Pの起立動作に同調して股関節アクチュエータ4L、4Rが起立支援動作を行うように、当該股関節アクチュエータの動作制御を、神経振動子モデルを用いた同調制御を行う制御装置20により行う。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)