| 出願番号 |
特願2014-198704 |
| 出願日 |
2014/9/29 |
| 出願人 |
国立研究開発法人産業技術総合研究所 |
| 公開番号 |
特開2016-068692 |
| 公開日 |
2016/5/9 |
| 登録番号 |
特許第6456641号 |
| 特許権者 |
国立研究開発法人産業技術総合研究所 |
| 発明の名称 |
マルチロータクラフトの姿勢安定化制御装置 |
| 技術分野 |
輸送 |
| 機能 |
機械・部品の製造 |
| 適用製品 |
マルチロータクラフトのピッチ軸回り、及びロール軸回りの姿勢安定化制御装置 |
| 目的 |
ロール軸回り、ピッチ軸回りについて、ロータに対する重心移動により姿勢制御を行うことで、機体のアンバランスやロータの推力、原動機出力などの個体差やバラつきを許容し、姿勢制御の応答性を抜本的に高める。 |
| 効果 |
機体のアンバランスやロータの推力、原動機出力などの個体差やバラつきをシンプルなアルゴリズムで解消することができる。
電動モータ以外の回転数変化の応答性が低い動力、例えば、レシプロエンジンやタービンエンジンを使用することも可能となる。この結果、現在のマルチコプタの欠点である、バッテリ使用に起因する飛行時間の制限を拡大することが可能となる。 |
技術概要
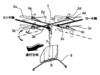 |
ロータ4a〜4dが周方向に配置されたマルチロータクラフトにおいて、マルチロータ部の中心部下方に、ロール軸回り及びピッチ軸回りに揺動可能なロッド7を介して、機体5を連結する。ロッド7のロール軸回り及びピッチ軸回りの揺動角により、機体5をウエイトとして、ロール軸回り及びピッチ軸回りの姿勢を制御し、ヨー軸回りの姿勢をロータ4a〜4dの回転数により制御する。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)