| 出願番号 |
特願2008-093111 |
| 出願日 |
2008/3/31 |
| 出願人 |
学校法人法政大学 |
| 公開番号 |
特開2009-243631 |
| 公開日 |
2009/10/22 |
| 登録番号 |
特許第4942046号 |
| 特許権者 |
学校法人法政大学 |
| 発明の名称 |
自由運動フライトシミュレータ装置 |
| 技術分野 |
機械・加工、輸送、土木・建築 |
| 機能 |
機械・部品の製造、制御・ソフトウェア、安全・福祉対策 |
| 適用製品 |
航空機用シミュレータ、その他 |
| 目的 |
パラレルメカニズム(並列機構)による自由運動駆動機構はコンパクトな構造、位置・姿勢の誤差が小さい、剛性が高い等の特徴からフライトシミュレータに応用されている。航空機用としては、コクピットやキャビン等に用いられるパラレルメカニズムの代表的な形態であるスチュワートプラットフォーム(Stewart Platform)タイプの6軸モーションベースが提供されている。この場合、最大の傾斜は25度となっている。 |
| 効果 |
本発明のフライトシミュレータ装置は従来のパラレルメカニズムの特徴である多自由度の位置決めをコンパクトな構造で実現可能としている。位置や姿勢、角度の誤差が小さい、剛性が高い、高速駆動が可能等の特徴を有するだけでなく、従来問題であった機構全体の大きさに比べ動作範囲が広く取れない点を、本発明の新規パラレルメカニズムにより、広範囲、高角度の変更を可能とした。 |
技術概要
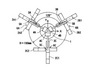 |
本発明の自由運動フライトシミュレータ装置は、第1には、X−Y平面上を任意に移動可能としたアクチュエータと、該アクチュエータ上に設置した脚部により支えられたモーションプレートとを有し、モーションプレートをアクチュエータの駆動により位置及び角度を制御可能としたことを特徴とするものである。 |
| イメージ図 |
|
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)
)