| 出願番号 |
特願2012-120053 |
| 出願日 |
2012/5/25 |
| 出願人 |
学校法人 中央大学 |
| 公開番号 |
特開2013-244562 |
| 公開日 |
2013/12/9 |
| 登録番号 |
特許第5954706号 |
| 特許権者 |
学校法人 中央大学 |
| 発明の名称 |
関節装置及びリンク機構 |
| 技術分野 |
機械・加工 |
| 機能 |
機械・部品の製造 |
| 適用製品 |
関節装置、関節装置を備えるリンク機構 |
| 目的 |
軸間干渉の発生を抑制すると共に小型化を実現した関節装置を提供する。
また、上記の関節装置に適し、かつ慣性力が小さく応答性に優れたリンク機構を提供する。 |
| 効果 |
軸間干渉の発生を抑制すると共に小型化を実現した関節装置を提供することができる。
また、上記の関節装置に適し、かつ慣性力が小さく応答性に優れたリンク機構を提供することができる。
本発明の関節装置、及びリンク機構は、人工手首関節、人工足首関節などの人工関節の他、産業用ロボット、パラレルリンクマニピュレータなどのマニピュレータなどに好適に用いられる。また、関節装置は、1自由度を有する関節装置を接続することで、球面軸受の代替機構として好適に用いることができる。 |
技術概要
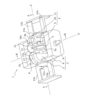 |
2つの軸線の周りに回動可能な関節装置において、第1軸線の周りに回動可能な外側プーリを一体的に有する第1回動体と、上記外側プーリをその外周部間にわたって通る第2軸線の周りで回動可能に上記第1回動体に接続された第2回動体とを設け、上記外側プーリに開放部を設け、該開放部には、上記第2回動体に一体的に設けられ、上記第2軸線の周りで回動可能な内側プーリを配置する。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)