| 出願番号 |
特願2011-196460 |
| 出願日 |
2011/9/8 |
| 出願人 |
国立大学法人九州工業大学 |
| 公開番号 |
特開2013-058105 |
| 公開日 |
2013/3/28 |
| 登録番号 |
特許第5874996号 |
| 特許権者 |
国立大学法人九州工業大学 |
| 発明の名称 |
物体運動推定装置、物体運動推定方法及びプログラム |
| 技術分野 |
情報・通信 |
| 機能 |
機械・部品の製造、制御・ソフトウェア |
| 適用製品 |
物体運動推定装置、物体運動推定方法及びプログラム |
| 目的 |
従来のオプティカルフロー推定法と比較して、推定精度を向上させ、かつ、例えば照明変動などに対して頑健な物体運動推定装置等を提供する。
さらに、異なる運動物体の境界等も同時に検出可能な物体運動推定装置等を提供する。 |
| 効果 |
動的システムモデルの状態として、推定領域における多くの画素の輝度とオプティカルフローを利用することにより、推定精度を向上させることができる。さらに、推定領域における多くの画素の情報を利用することにより、頑健な推定を実現することができる。
共分散行列を調整するための労力は軽減され、また、潜在的に、推定性能を改善することができうる。
さらに、異なる運動物体の分離に役立つ、物体の境界などを検出することが可能になる。 |
技術概要
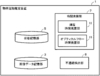 |
物体運動推定装置(1)は、画像データの系列における物体の運動を表すオプティカルフローを、動的システムモデルに基づき推定する。この動的システムモデルの状態は、画像データの推定領域における各ピクセルの輝度、及び、各ピクセルの全部又は一部でのオプティカルフローである。輝度時間発展部(11)は、ある時刻の状態における輝度及びオプティカルフローから、新たな時刻の輝度を演算する。オプティカルフロー時間発展部(13)は、少なくとも、ある時刻の状態におけるオプティカルフローから、新たな時刻の状態におけるオプティカルフローを演算する。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【可】
|
| 特許権実施許諾 |
【可】
|
)