| 出願番号 |
特願2011-194319 |
| 出願日 |
2011/9/6 |
| 出願人 |
国立大学法人 和歌山大学 |
| 公開番号 |
特開2013-052192 |
| 公開日 |
2013/3/21 |
| 登録番号 |
特許第5909063号 |
| 特許権者 |
国立大学法人 和歌山大学 |
| 発明の名称 |
パワーアシストロボット装置 |
| 技術分野 |
食品・バイオ、機械・加工 |
| 機能 |
機械・部品の製造、制御・ソフトウェア |
| 適用製品 |
パワーアシストロボット装置 |
| 目的 |
装着者の動作を拘束することなく補助することができるパワーアシストロボット装置およびその制御方法を提供する。 |
| 効果 |
アシスト方向以外の装着者の動作を妨げないように、上下軸線および前後軸線まわりに回転自在な腕用連結部および腰用連結部、たとえば駆動機器が取りつけられていない受動回転軸を、装着者の関節の外側周囲に配置しているので、装着者の動作を拘束することなく補助することができる。
2つの大腿用駆動部を保持する腕用保持部を軽量化することができ、装着者の負担を軽減することができる。
装着者が出せる以上の力や速度を出せないように供給圧力や流量を制限することで、装着者の安全を確保することができる。 |
技術概要
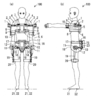 |
肩の動きを補助するための電動モータ1は、左右の肩関節の両サイドに配置され、受動回転軸2〜4を介して背面フレーム5に連結される。腰の動きを補助するための電動モータ11は、左右の腰関節の両サイドに配置され、受動回転軸12〜14を介して背面フレーム15に連結される。制御部132は、電動モータ1,11に含まれるロータリエンコーダ等から取得する関節角度、回転の有無、回転方向、スイッチの状態、および腰の傾きに基づいて、装着者の腕および大腿に作用する静止トルクを算出する。そして、制御部132は、電動モータ1,11に付加される減速機の減速比を1/50程度の低減速比にして、電動モータ1,11を駆動する。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)