| 出願番号 |
特願2012-157471 |
| 出願日 |
2012/7/13 |
| 出願人 |
国立研究開発法人産業技術総合研究所 |
| 公開番号 |
特開2014-019210 |
| 公開日 |
2014/2/3 |
| 登録番号 |
特許第5978423号 |
| 特許権者 |
国立研究開発法人産業技術総合研究所 |
| 発明の名称 |
クローラ走行型探索用ロボット |
| 技術分野 |
輸送 |
| 機能 |
機械・部品の製造 |
| 適用製品 |
クローラ走行型探索用ロボット |
| 目的 |
クローラ型探索用ロボットの小型コンパクト化、低コスト化を実現しながら、高い段差を確実に乗り越え可能とし、車体前壁に設けたCCDカメラのアングルを自由に調整できるようにする。 |
| 効果 |
クローラ走行装置の小型コンパクト化を実現した上で、高い段差を確実に乗り越えることが可能になり、アングル調整機構を設けることなく、車体の前壁に設けたCCDカメラ等の撮影部により、上方、下方を含むさまざまなアングルで環境中必要な箇所の撮影を簡単な操作で行うことができる。 |
技術概要
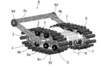 |
クローラ走行装置の車体1両側壁に、駆動輪2、従動輪3の車軸間の間に位置して、コの字アーム9の両支軸9aを回転可能に取り付ける。無限軌道帯4が段差の直前に到達した際、無限軌道帯4が段差の手前側上面角部を乗り上げていく際、さらには車体1の前壁に設けたCCDカメラ8により、上方、下方の環境を撮影する際、アーム部9dの先端に取り付けた車体幅方向アーム9cを、無限軌道帯4の前端下方あるいは後端下方に向けて回転させ、外部の環境を押圧することにより、車体の傾斜角度を制御する。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)