| 出願番号 |
特願2011-009370 |
| 出願日 |
2011/1/20 |
| 出願人 |
公益財団法人鉄道総合技術研究所 |
| 公開番号 |
特開2011-172472 |
| 公開日 |
2011/9/1 |
| 登録番号 |
特許第5593240号 |
| 特許権者 |
公益財団法人鉄道総合技術研究所 |
| 発明の名称 |
電動機制御方法及び電動機制御装置 |
| 技術分野 |
電気・電子、情報・通信 |
| 機能 |
制御・ソフトウェア |
| 適用製品 |
電動機制御装置、動輪、再粘着制御、電動機制御方法、電気車、電気自動車 |
| 目的 |
回転検出信号に含まれるノイズ成分の除去と、時間遅れの削減との両者のバランスを図った新たな再粘着制御手法の提供。 |
| 効果 |
回転検出信号に含まれるノイズ成分の除去と、時間遅れの削減との両者のバランスを適切に図った再粘着制御を実現できる。 |
技術概要
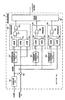 |
この技術では、動輪を駆動する電動機を制御して動輪の再粘着制御を行う電動機制御方法は、随時検出される動輪の速度をもとに、微分演算と、時間軸方向に平滑化する第1の平滑化処理とを行って加速度を検出する第1の加速度検出ステップと、随時検出される動輪の速度をもとに、微分演算と、時間軸方向に平滑化する平滑化処理であって第1の平滑化処理よりも平滑化時間幅が狭い第2の平滑化処理とを行って加速度を検出する第2の加速度検出ステップと、第1の加速度検出ステップにおいて検出した加速度を用いて空転滑走の発生を検出する空転滑走発生検出ステップと、空転滑走発生検出ステップの検出に応じて電動機のトルク引き下げ制御を開始するトルク引き下げ開始ステップと、トルク引き下げ制御の開始後に、第2の加速度検出ステップにおいて検出した加速度を用いて空転滑走後の回復を検出する回復検出ステップと、回復検出ステップの検出に応じてトルク引き下げ制御を終了するトルク引き下げ終了ステップと、を含む。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)