| 出願番号 |
特願2007-017376 |
| 出願日 |
2007/1/29 |
| 出願人 |
国立大学法人広島大学 |
| 公開番号 |
特開2008-186113 |
| 公開日 |
2008/8/14 |
| 登録番号 |
特許第4528984号 |
| 特許権者 |
国立大学法人広島大学 |
| 発明の名称 |
PID制御装置及びPID制御方法 |
| 技術分野 |
情報・通信 |
| 機能 |
機械・部品の製造、制御・ソフトウェア |
| 適用製品 |
予測モデル、化学プロセス、石油精製プロセス、自己調整、制御性能、制御誤差 |
| 目的 |
予測モデルに基づいて、PID制御対象への入力の差分に対する重み係数を含む制御則を用いてPIDパラメータを決定して、制御対象を制御する場合に、重み係数を適切にかつ容易に設定できるようにして、所望の制御性能が確実に得られるようにすることの実現。 |
| 効果 |
決定されたPIDパラメータを用いて制御対象を制御することで、制御誤差の分散を所望の値に抑えることができるともに、入力の差分の分散(入力の振れ)をも抑えることができる。よって、重み係数を適切にかつ容易に設定することができ、所望の制御性能が確実に得られるようになる。 |
技術概要
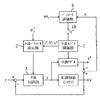 |
この技術では、PID制御対象への入力と入力に対する制御対象からの出力とに基づいて、制御対象の予測モデルを構築する予測モデル構築手段と、予測モデル構築手段により構築された予測モデルに基づいて、入力の差分に対する重み係数を含む制御則を用いてPIDパラメータを決定するPIDパラメータ決定手段と、PIDパラメータ決定手段により決定されたPIDパラメータを用いて、制御対象を制御する制御手段とを備えたPID制御装置とする。PIDパラメータ決定手段は、重み係数を変化させながら各重み係数毎にPIDパラメータを算出しかつ算出時に各重み係数に対応した制御誤差の分散と入力の差分の分散とを計算して、制御誤差の分散と入力の差分の分散との2軸のグラフ上に計算値をプロットすることで、重み係数を変化させたときの、制御誤差の分散と入力の差分の分散とに関するトレードオフ曲線を描くとともに、トレードオフ曲線上において、予め設定された所定の条件を満足する位置を求めかつその位置に対応する重み係数及びPIDパラメータを求めて、PIDパラメータを、制御手段が用いるPIDパラメータとして決定する。 |
| 実施実績 |
【試作】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)