| 出願番号 |
特願2004-221031 |
| 出願日 |
2004/7/29 |
| 出願人 |
国立大学法人静岡大学 |
| 公開番号 |
特開2006-038718 |
| 公開日 |
2006/2/9 |
| 登録番号 |
特許第4332629号 |
| 特許権者 |
国立大学法人静岡大学 |
| 発明の名称 |
量子化誤差を軽減する距離計測方法及び距離計測システム |
| 技術分野 |
電気・電子 |
| 機能 |
機械・部品の製造、検査・検出 |
| 適用製品 |
量子化誤差を軽減する距離計測システム |
| 目的 |
3次元計測において、高精度化を実現する。具体的には、多数のカメラを用いて、3次元計測において発生する量子化誤差の影響を低減する。さらに、対応点を求めるための方法も提供する。 |
| 効果 |
カメラの撮像素子に空間ローパスフィルタを設け、ターゲットの測定点となる対応点を撮像素子の2画素以上で捉えるようにする。このようにして捉えられた対応点の重心を計算することにより、擬似的に高解像度の撮像素子を用いたものとみなせるから、量子化誤差を低減することができる。 |
技術概要
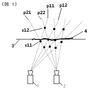 |
画素数が有限である撮像素子を備えたカメラの撮像画像から、三角測量法に基づき対象物までの距離を求める方法において、3台以上のカメラをカメラ間隔を固定して配置し、2つのカメラを選定し、この2つのカメラ画像により対象物までの距離を三角測量法により計測し、さらに他の組合せとなる2つのカメラを選定し、この組合せにより同じく対象物までの距離を三角測量法により計測し、これらの計測結果を平均処理することにより対象物までの距離を算出してなる量子化誤差を軽減する距離計測方法である。また、カメラの撮像素子に空間ローパスフィルタを設け、対象物の測定点となる対応点を撮像素子の2画素以上で捉えて、その重心から距離を求める、量子化誤差を軽減する距離計測方法である。図1は量子化誤差の発生を示す図、図2はカメラ6台による3組の計測結果を示す図、図3は平均化による改善を示す図。(a)は1交点、(b)は4交点の平均、(c)は16交点の平均である。図4は計測誤差(差分)を示す図である。 |
| イメージ図 |
|
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)
)
)
)