| 出願番号 |
特願2004-362036 |
| 出願日 |
2004/12/14 |
| 出願人 |
国立大学法人長岡技術科学大学 |
| 公開番号 |
特開2006-167846 |
| 公開日 |
2006/6/29 |
| 登録番号 |
特許第4016114号 |
| 特許権者 |
国立大学法人長岡技術科学大学 |
| 発明の名称 |
ロボット用操作盤 |
| 技術分野 |
機械・加工、電気・電子 |
| 機能 |
機械・部品の製造、安全・福祉対策 |
| 適用製品 |
ロボット用操作盤 |
| 目的 |
ロボット用操作盤が落下したりロボット用操作盤に衝撃が加わった場合であっても、その際にはロボット用操作盤のスイッチがOFF状態となり、ロボットの稼動を停止させ、ロボットが暴走するようなことを発生させない信頼性が高く安全性の高いロボット用操作盤を提供する。 |
| 効果 |
ロボット用操作盤が落下したり、ロボット用操作盤の操作レバーに過大な力が加わった場合であっても、その際にはロボット用操作盤の三ポジションスイッチが確実にOFF状態となり、ロボットの稼動を停止させ、ロボットが暴走するようなことを発生させない信頼性が高く安全性の高いロボット用操作盤を提供することができる。 |
技術概要
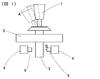 |
ロボット用操作盤の主要部概要構成を図1に示す。ロボット用操作盤の操作レバー1は、保持部材2に保持されており、操作レバー1を加圧して例えば左側(図1のA方向)に傾斜させると、操作レバー1の傾斜に連動して押圧部材3が右側(図1のB方向)に移動するように構成してある。そして、押圧部材3の右側に設けた三ポジションスイッチ4の押ボタン5を押圧部材3が押圧するように構成してある。押圧部材3が三ポジションスイッチ4の押ボタン5を一定量押圧した範囲(例えば2mm〜4mm)で三ポジションスイッチはON状態となり、2mm以下ではOFF状態であり、4mm以上でもOFF状態となる。そして、押ボタン5の押圧範囲は、例えば5mmに設定する。押圧部材3の周囲に設ける三ポジションスイッチ4は、押圧部材3の前後左右の周囲四箇所に設けることで、操作レバー1を前後左右に加圧して操作する際、最も作業性が良く、ロボット操作盤を操作する場合の安全性や信頼性を高めることができる。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)