| 出願番号 |
特願2006-295016 |
| 出願日 |
2006/10/30 |
| 出願人 |
国立大学法人宇都宮大学 |
| 公開番号 |
特開2008-110432 |
| 公開日 |
2008/5/15 |
| 登録番号 |
特許第4787965号 |
| 特許権者 |
国立大学法人宇都宮大学 |
| 発明の名称 |
壁面間移動装置 |
| 技術分野 |
機械・加工、輸送、土木・建築 |
| 機能 |
制御・ソフトウェア、機械・部品の製造、その他 |
| 適用製品 |
壁面間移動装置、ビルとビルの間のような人間が通れない狭い壁面間空間内を自由に移動できる壁面間移動ロボット |
| 目的 |
現在、片壁面を使って移動するロボットはあるが、両壁面を使って移動するロボットはない。この技術は、両壁面を使って、壁面間で保持されながら落下せずに移動することができる壁面間移動装置を提供する。 |
| 効果 |
都市高層ビルのビルとビルの間の空間は人間が通れないほどに狭い。このため、ビルの壁面間のスペースは無駄な空間となっている。この技術による壁面間移動ロボットは、この狭い空間内を自由に移動することができ、この空間を有効活用することを可能とする。壁面間の隙間を倉庫代わりにして物品を置いたり、壁面間を伝って移動して、建物の階上や階下を行き来して荷物を運搬したりすることも可能となる。 |
技術概要
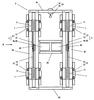 |
壁面に押し付けられる複数の弾性毛が植え込まれた滑走子と、弾性毛が壁面に接触する範囲で滑走子を振幅させる駆動手段と、駆動手段を支持する移動体本体とを備え、この駆動手段は、移動体本体に固定されたモータと、モータの回転運動を壁面に略垂直な方向に変換して滑走子に伝達する加振機構とからなっている。モータ及び加振機構により滑走子を加振させて滑走子を壁面に押圧することによって移動体本体の推進力を得ることができる。駆動手段としてエアシリンダを用いた壁面間移動装置を考案したが、壁面間移動装置まで圧縮空気をエアチューブで送る必要があることからエネルギー効率が好ましくなく、移動速度に限界があり、移動速度の正確な制御も困難であったが、駆動手段としてモーターと加振機構を採用することでこれらの課題は解決した。加振機構は、モータの回転運動を壁面と略平行な方向の往復直線運動に変換するクランク機構と、このクランク機構の往復直線運動を壁面と略垂直な方向の往復直線運動に変換するリンク機構とから構成してもよい。 |
| イメージ図 |
|
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)
)
)
)