| 出願番号 |
特願2008-005426 |
| 出願日 |
2008/1/15 |
| 出願人 |
独立行政法人産業技術総合研究所 |
| 公開番号 |
特開2009-166585 |
| 公開日 |
2009/7/30 |
| 登録番号 |
特許第4911411号 |
| 特許権者 |
国立研究開発法人産業技術総合研究所 |
| 発明の名称 |
飛行機械の自動離陸システム |
| 技術分野 |
輸送 |
| 機能 |
機械・部品の製造、制御・ソフトウェア |
| 適用製品 |
飛行機械の自動離陸システム |
| 目的 |
翼と本体である胴体とを、互いに直交する2軸を中心に回動可能な関節により結合し、2軸を中心に各々任意に回動する駆動装置を備えた飛行機械の離陸特性を生かして、離陸距離計算を自動的に行い、離陸の可否判定を自動的に行うことができるようにした飛行機械の自動離陸システムを提供する。 |
| 効果 |
翼と本体である胴体とを、互いに直交する2軸を中心に回動可能な関節により結合し、2軸を中心に各々任意に回動する駆動装置を備えた飛行機械を用い、電子制御による振子安定構造とした飛行機械は、離陸走行前の地上接地時に主翼の迎角が設定可能なため、この特性を生かして迎角の関数として離陸速度や離陸距離という離陸特性を予め設定することができるため、導出された離陸障害範囲内に障害物がないことと、風速等の各種条件を適宜検出すれば、離陸の可否を自動判定することが可能となり、自動離陸が可能となる。 |
技術概要
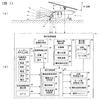 |
自動離陸システムは、翼と本体である胴体とを、互いに直交する2軸を中心に回動可能な関節により結合し、2軸を中心に各々任意に回動する駆動装置を備えた飛行機械において、離陸走行開始地点前方の障害物迄の距離及び該障害物の高さを検出する障害物検出部と、予め得られている離陸特性データにより、翼の迎角を該飛行機械の最短離陸距離に設定したときの離陸障害範囲内に障害物が存在するか否かを判別する離陸可否判別部と、離陸可否判別部で離陸不能と判別したとき離陸不能信号を出力する離陸自動制御部とを備える。このような特性を備えた飛行機械は、例えば図1(b)に示すような飛行制御装置11により、特に離陸の自動制御を確実に行うことができる。図1(b)に示す飛行制御装置11では、機体1に備えたレーダー4によって前方の障害物を検出し、更に監視カメラ5によって周囲を監視すると共に前方の障害物の検出も可能とする。図2は用いる飛行機械の離陸特性を示す図であり、図3は飛行機械の説明図であり、(a)は外観図、(b)は胴体部分の断面図、(c)は振り子安定機能を説明する図、である。 |
| イメージ図 |
|
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)
)
)