| 出願番号 |
特願2006-092730 |
| 出願日 |
2006/3/30 |
| 出願人 |
国立大学法人宇都宮大学 |
| 公開番号 |
特開2007-260882 |
| 公開日 |
2007/10/11 |
| 登録番号 |
特許第4787962号 |
| 特許権者 |
国立大学法人宇都宮大学 |
| 発明の名称 |
壁面間移動装置 |
| 技術分野 |
機械・加工 |
| 機能 |
その他 |
| 適用製品 |
壁面間移動装置、壁面間移動ロボット |
| 目的 |
両壁面を使って移動する、壁面間で保持されながら落下せずに移動することができる壁面間移動装置を提供する。 |
| 効果 |
壁面に押し付けられる複数の弾性毛が植え込まれた滑走子と、弾性毛が壁面に接触する範囲で滑走子を振幅させる駆動手段と、駆動手段を支持する移動体本体とを備えていることから、弾性毛の弾性力と摩擦係数との関係により滑走子を利用して移動体本体を壁面間に沿って落下させずに進行させることができる。 |
技術概要
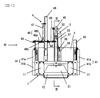 |
図1に示す壁面間移動装置は、滑走子11が固定された滑走子体1と、滑走子体1を振幅させる駆動手段2と、滑走子体1及び駆動手段2を支持する移動体本体3と、移動体本体3を壁面と略平行に維持するとともに落下を防止するためのガイド手段4を備えている。この構成によれば、駆動手段2により滑走子体1を加振させて滑走子11を壁面に押圧することによって移動体本体3の推進力を得ることができる。滑走子体1は、複数の滑走子11と、滑走子11を支持する滑走子支持枠12とからなる。図2に示すように、一対の滑走子体1、1が、移動体本体3の左右にそれぞれ配置され、各滑走子体1の内側には斜面板31が螺子によって固定されている。斜面板31は移動装置の進行方向に対して上側が広く、下側が狭くなるようになっている。移動体本体3にはアクチュエータ支持フレーム32が接続されており、アクチュエータ支持フレーム32にアクチュエータ33が鉛直に固定され、そのロッド34が進行方向に伸縮可能となっている。図3は壁面間移動装置をIVの方向から見た図である。図4は滑走子1の動作原理の説明図であり、(a)は前進、(b)は後進の状態を示す。 |
| イメージ図 |
|
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)
)
)
)