| 出願番号 |
特願2005-138460 |
| 出願日 |
2005/5/11 |
| 出願人 |
国立大学法人 鹿児島大学 |
| 公開番号 |
特開2006-317222 |
| 公開日 |
2006/11/24 |
| 登録番号 |
特許第4825967号 |
| 特許権者 |
国立大学法人 鹿児島大学 |
| 発明の名称 |
力覚センサ |
| 技術分野 |
電気・電子 |
| 機能 |
検査・検出 |
| 適用製品 |
ロボット、指先 |
| 目的 |
剛性を低くしなくても感度を向上させることができ、好ましくは3軸方向における感度を均等にすることができる力覚センサの提供。 |
| 効果 |
第2の梁部材において第1の梁部材よりも大きな歪が発生するため、第1の梁部材の剛性を維持したまま高い感度を得ることができる。従って、力覚センサ全体として、剛性を低下させることなく高い感度を得ることができる。 |
技術概要
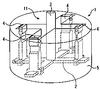 |
この技術では、力覚センサには、平面形状が十字型の梁部及びこの梁部の中心から突出する突出部を備えた構造体が設けられている。構造体は、例えばステンレス製である。梁部の4つの端部は、夫々弾性梁に回転可能に連結されている。弾性梁は、例えばジュラルミン製である。即ち、各弾性梁の下端及び梁部の各端部には、これらを貫通する穴が形成されており、この穴の中にシャフトが挿入されている。そして、これらが筐体に収納されている。筐体の内側には、4つの固定部が設けられており、この固定部の各々に各弾性梁が回転可能に固定されている。即ち、各弾性梁の上端及び各突出部には、これらを貫通する穴が形成されており、この穴の中にシャフトが挿入されている。 |
| 実施実績 |
【無】 |
| 許諾実績 |
【無】 |
| 特許権譲渡 |
【否】
|
| 特許権実施許諾 |
【可】
|
)